canbus
SocketCAN은 어떻게 작업 결과를 얻습니까?
CAN 작동 상태를 확인할 수 있나요? 작동 예: write(socket, &frame, sizeof(frame)); 프레임이 ACK되었는지 확인하거나 다른 CAN 상태 정보를 얻기 위해 SocketCAN을 사용할 수 있습니까? ...
CAN 작동 상태를 확인할 수 있나요? 작동 예: write(socket, &frame, sizeof(frame)); 프레임이 ACK되었는지 확인하거나 다른 CAN 상태 정보를 얻기 위해 SocketCAN을 사용할 수 있습니까? ...
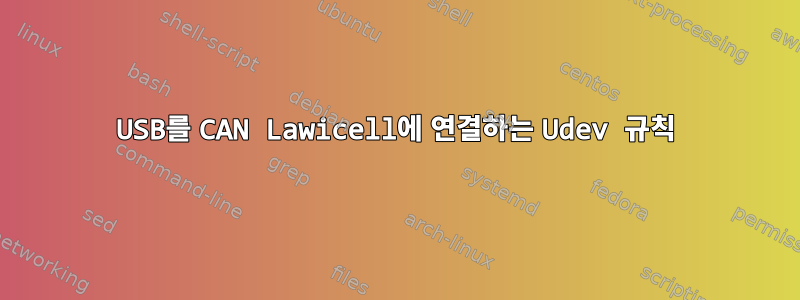
![ip link set can0 유형은 유용한 사용법을 제공할 수 있습니다. ip link set DEVICE 유형 can [bit rate BITRATE [sample-POINT] ] [ tq TQ prop-seg PROP_SEG 위상 세그먼트 1 위상 세그먼트 1 위상 세그먼트 2 위상 세그먼트 2 [ sjw SJW ] ] [ dbitrate BITRATE [ dsample-point SAMPLE-POINT] ] [ dtq TQ dprop-seg PROP_SEG dphase-seg1 PHASE-SEG1 dphase-seg2 PHASE-SEG2 [ dsjw SJW ] ] [ tdcv TDCV tdco TDCO tdcf TDCF ] [ 링 뒤로 { 위로 | } 꺼짐 } ] [ 듣기만 { 켜짐 | 꺼짐 } ] [ 원샷 { 켜짐 꺼짐 꺼짐 } ] [ fd { on | off} ] [ fd-non-iso { on | off off } ] [ cc-len8-dlc { on | off } ] [ tdc-mode { 자동 | off } ] [ restart-ms TIME-MS ] [ 재시작 ] [ 종료 { 0..65535 } ] 여기서: BITRATE := { NUMBER(bps) } SAMPLE-POINT := { 0.000..0.999 } TQ := { NUMBER in bps ns } PROP-SEG := {tq의 숫자} PHASE-SEG1 := {tq의 숫자} PHASE-SEG2 := {tq의 숫자} SJW := {tq의 숫자} TDCV := {tc의 숫자 } TDCO := { tc의 숫자 } TDCF := { tc의 숫자 } MS 다시 시작 := { 0 | 밀리초 단위의 숫자 }](https://linux55.com/image/225338/ip%20link%20set%20can0%20%EC%9C%A0%ED%98%95%EC%9D%80%20%EC%9C%A0%EC%9A%A9%ED%95%9C%20%EC%82%AC%EC%9A%A9%EB%B2%95%EC%9D%84%20%EC%A0%9C%EA%B3%B5%ED%95%A0%20%EC%88%98%20%EC%9E%88%EC%8A%B5%EB%8B%88%EB%8B%A4.%20ip%20link%20set%20DEVICE%20%EC%9C%A0%ED%98%95%20can%20%5Bbit%20rate%20BITRATE%20%5Bsample-POINT%5D%20%5D%20%5B%20tq%20TQ%20prop-seg%20PROP_SEG%20%EC%9C%84%EC%83%81%20%EC%84%B8%EA%B7%B8%EB%A8%BC%ED%8A%B8%201%20%EC%9C%84%EC%83%81%20%EC%84%B8%EA%B7%B8%EB%A8%BC%ED%8A%B8%201%20%EC%9C%84%EC%83%81%20%EC%84%B8%EA%B7%B8%EB%A8%BC%ED%8A%B8%202%20%EC%9C%84%EC%83%81%20%EC%84%B8%EA%B7%B8%EB%A8%BC%ED%8A%B8%202%20%5B%20sjw%20SJW%20%5D%20%5D%20%5B%20dbitrate%20BITRATE%20%5B%20dsample-point%20SAMPLE-POINT%5D%20%5D%20%5B%20dtq%20TQ%20dprop-seg%20PROP_SEG%20dphase-seg1%20PHASE-SEG1%20dphase-seg2%20PHASE-SEG2%20%5B%20dsjw%20SJW%20%5D%20%5D%20%5B%20tdcv%20TDCV%20tdco%20TDCO%20tdcf%20TDCF%20%5D%20%5B%20%EB%A7%81%20%EB%92%A4%EB%A1%9C%20%7B%20%EC%9C%84%EB%A1%9C%20%7C%20%7D%20%EA%BA%BC%EC%A7%90%20%7D%20%5D%20%5B%20%EB%93%A3%EA%B8%B0%EB%A7%8C%20%7B%20%EC%BC%9C%EC%A7%90%20%7C%20%EA%BA%BC%EC%A7%90%20%7D%20%5D%20%5B%20%EC%9B%90%EC%83%B7%20%7B%20%EC%BC%9C%EC%A7%90%20%EA%BA%BC%EC%A7%90%20%EA%BA%BC%EC%A7%90%20%7D%20%5D%20%5B%20fd%20%7B%20on%20%7C%20off%7D%20%5D%20%5B%20fd-non-iso%20%7B%20on%20%7C%20off%20off%20%7D%20%5D%20%5B%20cc-len8-dlc%20%7B%20on%20%7C%20off%20%7D%20%5D%20%5B%20tdc-mode%20%7B%20%EC%9E%90%EB%8F%99%20%7C%20off%20%7D%20%5D%20%5B%20restart-ms%20TIME-MS%20%5D%20%5B%20%EC%9E%AC%EC%8B%9C%EC%9E%91%20%5D%20%5B%20%EC%A2%85%EB%A3%8C%20%7B%200..65535%20%7D%20%5D%20%EC%97%AC%EA%B8%B0%EC%84%9C%3A%20BITRATE%20%3A%3D%20%7B%20NUMBER(bps)%20%7D%20SAMPLE-POINT%20%3A%3D%20%7B%200.000..0.999%20%7D%20TQ%20%3A%3D%20%7B%20NUMBER%20in%20bps%20ns%20%7D%20PROP-SEG%20%3A%3D%20%7Btq%EC%9D%98%20%EC%88%AB%EC%9E%90%7D%20PHASE-SEG1%20%3A%3D%20%7Btq%EC%9D%98%20%EC%88%AB%EC%9E%90%7D%20PHASE-SEG2%20%3A%3D%20%7Btq%EC%9D%98%20%EC%88%AB%EC%9E%90%7D%20SJW%20%3A%3D%20%7Btq%EC%9D%98%20%EC%88%AB%EC%9E%90%7D%20TDCV%20%3A%3D%20%7Btc%EC%9D%98%20%EC%88%AB%EC%9E%90%20%7D%20TDCO%20%3A%3D%20%7B%20tc%EC%9D%98%20%EC%88%AB%EC%9E%90%20%7D%20TDCF%20%3A%3D%20%7B%20tc%EC%9D%98%20%EC%88%AB%EC%9E%90%20%7D%20MS%20%EB%8B%A4%EC%8B%9C%20%EC%8B%9C%EC%9E%91%20%3A%3D%20%7B%200%20%7C%20%EB%B0%80%EB%A6%AC%EC%B4%88%20%EB%8B%A8%EC%9C%84%EC%9D%98%20%EC%88%AB%EC%9E%90%20%7D.png)
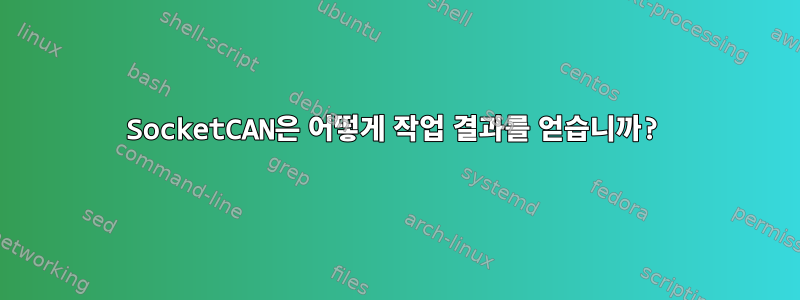
CANFD 버스에 대한 샘플링 포인트를 설정해야 합니다. 다음 도움말 명령은 캔의 샘플 포인트를 설정하는 방법을 보여 주지만 내 캔 구성에는 샘플 포인트 매개변수가 표시되지 않습니다. ip link set can0 유형은 유용한 사용법을 제공할 수 있습니다. ip link set DEVICE 유형 can [bit rate BITRATE [sample-POINT] ] [ tq TQ prop-seg PROP_SEG 위상 세그먼트 1 위상 세그먼트 1 위상 세그먼트 2 위상 세그먼트 2 [ sjw SJW ...
드라이버 내부에서 소켓CAN 장치를 읽으려고 합니다. 저는 skb를 설정하고 관련 정보와 함께 can_rx_register이라는 콜백을 등록하는 호출 에 전달하고 있습니다 sc_rcv. // callback static void sc_rcv(struct sk_buff *skbr, void *data) // initialization result = can_rx_register(&init_net, dev, 10 | CAN_INV_FILTER, CAN_SFF_MASK, &sc_rcv, s...
임베디드 시스템의 CAN 인터페이스를 확인하고 싶습니다. 두 개의 CAN 포트가 있습니다: can0및 can1. 나는 그것들을 모두 다음 순서로 가져옵니다. # ip link set can0 type can bitrate 1000000 dbitrate 2000000 fd on # ip link set can0 up # ip link set can1 type can bitrate 1000000 dbitrate 2000000 fd on # ip link set can1 up 나는 그것들을 서로 연결하고...
Waveshare는 Raspberry Pi를 위한 훌륭한 CAN HAT을 만듭니다(참조여기), 그러나 지침은 Armbian이 아닌 Raspberry Pi OS에만 적용됩니다. Banana Pi BPI-M2 Zero는 Raspberry Pi와 동일한 핀아웃을 가지고 있지만 Armbian을 실행합니다. Armbian의 오버레이 시스템을 사용하여 Waveshare CAN HAT를 설정하는 방법은 무엇입니까? ...
%20Linux%204.19.94-ti-r42%EC%9D%98%20can%2C%20can-dev%20%EC%BB%A4%EB%84%90%20%EB%AA%A8%EB%93%88%EC%97%90%20%EB%8C%80%ED%95%9C%20%EC%A0%95%EB%B3%B4.png)
여러 커널 모듈이 누락된 것 같습니다. 구체적으로, can그리고 can_dev. or를 실행하면 modprobe can모듈이 로드되지 않습니다 modprobe can-dev. 모듈이 디렉토리에 없기 때문인 것 같아요 [/lib/modules/4.19.94-ti-r42/kernel/drivers/net/can]$ ls slcan.ko.xz spi usb vcan.ko.xz 로드된 유일한 CAN 모듈은 can_rawSocketCAN과 잘 작동하는 것 같습니다. 내 문제는 내가 사용하려고한다는 것입...
내 Linux 상자에 PEAK Canbus 어댑터(USB)가 연결되어 있고 Qt C++ 프로그램에서 액세스할 수 있습니다. 모든 것이 잘 작동하지만 프레임을 수신하면 모두 SFF(11비트) ID입니다. candump에는 모두 11자리 ID가 있습니다. EFF(29비트) 프레임을 보내도 들어오는 프레임만 SFF로 표시됩니다. candump를 사용하는 경우에도 동일한 일이 발생하며 모든 프레임에는 SFF ID가 표시됩니다. 그러나 랩톱을 Windows로 전환하고 PEAK 뷰어를 실행한 다음 Linux로 ...
유사한 USB 네트워크 장치가 여러 개 있습니다. 이 경우에는 CAN(can0 및 can1)이 서로 다른 네트워크에 연결되어 있지만 이는 다른 여러 네트워크(예: WiFi, 이더넷 등)에서도 비슷한 문제인 것 같습니다. 현재 can0과 can1로 표시되어 있는데, 더 연결할 수도 있습니다. 각 위치에 액세스하는 일종의 지속성을 유지하려고 노력하고 있습니다. udev를 사용하는 비네트워크 장치의 경우 올바른 코드가 올바른 장치에 액세스할 수 있도록 idVendor, idProduct 및 일련 번호에 대...
can0나는 (Confirmed works를 사용하여 ) SocketCAN 인터페이스를 구성했습니다 can-utils. 시작 시 인터페이스를 표시하기 .network위한 다음 구성 파일이 있습니다 .systemd-networkd #/etc/systemd/network/80-can.network [Match] Name=can0 [CAN] BitRate=250K RestartSec=100ms [Link] Unmanaged=no RequiredForOnline=yes 부팅 후 인터페이스가 작동되는 것...

Virtualbox에서 SocketCAN을 사용해 본 경험이 있는 사람이 있습니까? 나는 Xubuntu를 사용하고 있습니다. 저는 can, can_raw, can_dev 및 제가 사용하고 있던 특정 캔 모듈에 대한 관련 드라이버를 modprobing하는 것부터 시작했습니다. 또한 Virtualbox에 연결하려는 CAN-USB 장치를 전달하도록 지시합니다. 명령을 실행하면 다음과 같은 메시지가 sudo ip link set can0 type can bitrate [bitrate]나타납니다. 장치 "ca...
시작 시 인터페이스를 자동으로 불러오기 위해 /etc/network/interfaces다음과 같이 파일을 편집했습니다. debian@beaglebone:~$ sudo nano /etc/network/interfaces 그리고 파일 끝에 다음을 추가합니다. auto can1 iface can1 inet manual pre-up /sbin/ip link set can1 type can bitrate 250000 #triple-sampling on restart-ms 100 up /sbin/...
다음 회사에서 USB/CAN 어댑터를 구입했습니다 lsusb. OpenMoko, Inc. Geschwister CAN 어댑터 다음에서 소켓 인터페이스를 제공합니다 ip addr. 5: can0: <NOARP,UP,LOWER_UP,ECHO> mtu 16 qdisc pfifo_fast state UP group default qlen 10 link/can 버스에는 지속적으로 데이터를 전송하는 다른 장치가 있습니다. 컴퓨터를 다시 시작하면 다음 오류가 발생하기 때문에 더 이상 데이터를 보...
두 개의 CAN 포트가 있는 장치가 동일한 CAN-id를 갖는 경우 문제가 발생합니까? 어떤 이유로 네트워크는 분리되어 있지만 두 네트워크의 "마스터"는 동일해야 합니다. 편집: 네트워크 토폴로지 아래. ("master") CAN-BUS 0 +----------+ +----------+ |------->| CAN-ID 2 | | |<------| +----------+ | CAN-ID 1 | | |<------| ...
mcp251x커널 4.9.253-tegra가 있는 Linux 시스템에 드라이버를 설치하려고 하는데 다음 명령을 사용했습니다. # modprobe mcp251x 명령어로 확인해보니 # dmesg | grep mcp251x 하지만 아무것도 표시되지 않습니다. 드라이버가 폴더에 있습니다. /lib/modules/4.9.253-tegra/kernel/drivers/net/can/spi/mcp251x.ko 그래도 로드되지 않습니다. 이 커널 버전에서 이 드라이버를 올바르게 설치하는 방법은 무엇입니까...
Lawicel CAN 어댑터를 사용하여 센서에 연결하고 있으며 수동 캔 설정을 피하기 위해 udev 규칙을 설정하고 싶습니다. 설명서는 다음과 같이 설정할 수 있습니다. sudo slcand -o -c -f -s6 /dev/ttyUSB0 slcan0 sudo ifconfig slcan0 up 이를 실행하면 candump slcan0데이터를 인쇄하여 연결이 유효하다는 것을 알 수 있습니다. 그래서 저는 udev 규칙 설정 가이드를 따르고 있습니다.협회. 그러나 이것은 작동하지 않습니다. udev 규칙...